GHDL est un logiciel écrit en ADA permettant de faire l’analyse, la compilation, la simulation ainsi que la synthèse du VHDL. Le VHDL, quant à lui, est un langage de description matériel très utilisé dans le développement sur FPGA ou ASIC. À l’origine, GHDL est un « side-project » de Tristan Gingold lui permettant de se faire la main avec ADA.
GHDL est devenu l’outil indispensable pour faire de la simulation VHDL aujourd’hui. Après presque 20 ans de développement, voici que sort en version 1.0.0 le logiciel de simulation VHDL nommé GHDL. En prime, GHDL s’offre un nouveau logo:
Peu d’informations ont filtré sur cette sortie pour le moment. On peut soupçonner que ce soit une sortie anniversaire pour marquer les 20 ans du logiciel. Il n’en reste pas moins que GHDL est devenu un maillon indispensable dans l’écosystème opensource du monde FPGA et des ASIC.
Cette version 1.0.0 supporte désormais complètement les standards 1987, 1993 et 2002 du langage défini par l’IEEE. Le support de VHDL 2008 est noté comme partiel pour le moment.
Depuis quelques années, le développement du projet s’est accéléré et supporte de mieux en mieux les projets tierces comme Yosys bien sûr mais également CocoTB pour les testbenchs écrit en Python ainsi que les standards de vérification comme UVVM, OSVVM, VUnit issues du standard d’accelera.
Un support partiel d’un langage de PSL (Properties Specification Language) est également inclus. Il permet de décrire les propriétés du système pour faire de la vérification formelle.
Et surtout, il est possible de faire de la Synthèse. Certes, l’extension ghdl-yosys-plugin est encore en développement, mais l’exemple TapTempo l’a montré : Il est tout à fait possible de faire de la synthèse VHDL avec.
Cette version mature est surtout une occasion de mettre en valeur cet outil indispensable dans le monde du développement numérique (gateware).
Ayant préparé tout le matériel pour faire du TapTempo en Verilog, il était trop tentant de réaliser la même chose en VHDL. L’occasion de se plonger dans ce langage de description matériel concurrent du Verilog. L’occasion également de parler des avancées de GHDL, un simulateur libre du VHDL, et désormais également capable de faire la synthèse en conjonction avec Yosys.
Pour comprendre TapTempo dans la culture moulesque de LinuxFr.org, il est conseillé d’aller faire un petit tour sur la page wiki homonyme.
Comme l’indique le titre de cette dépêche, nous allons effectuer un « portage » du projet TapTempo, qui était écrit en Verilog, vers le language VHDL. Nous aurons donc l’avantage de profiter d’une architecture déjà conçue. Et comme une partie des stimulus de simulation (banc de test) ont été écrit en Python avec CocoTB, nous allons pouvoir les reprendre (presque) tels quels pour simuler notre version VHDL.
Le VHDL
Le VHDL – pour VHSICHardware Description Language – est un langage de description matérielle issu d’une commande du ministère de la Défense américaine, c’est donc en toute logique qu’il soit surtout populaire… en Europe !
Le VHDL s’inspire fortement du langage ADA pour décrire le comportement des circuits intégrés numériques. Cela permet de décrire un modèle que l’on peut ensuite simuler au moyen d’un simulateur. Le simulateur VHDL OpenSource le plus connu est GHDL, initialement développé par le français Tristan Gringold comme une surcouche à GCC. Il existe également un simulateur opensource nommé nvc, mais il est moins mature que GHDL. Les autres simulateurs OpenSource, comme FreeHDL ou VerilatorVHDL, sont plus anecdotiques.
À partir d’une source VHDL il est également possible de générer un schéma de portes et de bascules logiques au moyen d’un logiciel de synthèse. Pendant longtemps, les seuls logiciels libres de synthèse HDL ciblaient le Verilog (OdinII et Yosys). Mais depuis cette année une extension GHDL est apparue pour Yosys. Si cette extension n’est pas encore vraiment stabilisée, elle n’en reste pas moins parfaitement utilisable comme nous allons le voir dans cet exemple.
Le VHDL est très hiérarchique, on décrit des modules avec leurs entrées-sorties que l’on assemble ensuite à la manière d’un schéma bloc dans un composant «top».
Dans le cas de TapTempo, l’interface du module «top» est déclarée dans une entité comme ceci :
entity taptempo is
port (
clk_i : in std_logic;
btn_i : in std_logic;
pwm_o : out std_logic
);
end entity taptempo;
VHDL n’est pas sensible à la casse ! C’est quelque chose qui est très perturbant mais dans l’exemple ci-dessus Entity est exactement identique à entity ou ENTITY. En pratique, le simulateur mettra tout en minuscule.
Le module possède deux entrées : l’horloge (clk_i) et le bouton (btn_i) ainsi qu’une sortie pwm (pwm_o) pour l’affichage. Il est possible de définir des paramètres pour la génération du module en utilisant le mot clef generic de la même manière que le port. Pour plus de simplicité nous choisirons plutôt de mettre tous les paramètres dans un package séparé (nommé taptempo_pkg.vhd), à la manière des include du C/C++.
Le type std_logic est utilisé pour représenter les états que peut prendre un signal. En simulation, il peut prendre 9 valeurs différentes : – 0 : 0 logique; – 1 : 1 logique; – Z : Haute impédence; – X : inconnue, plusieurs pilotes en conflit -> erreur; – L : 0 faible, peut-être vu comme une résistance de tirage à la masse (pull-down); – H : 1 faible, peut-être vu comme une résistance de tirage à Vcc (pull-up); – W : signal faible inconnu, quand il y a un conflit entre L et H mais qu’un troisième pilote fort (0 ou 1) pourrait tout de même mettre le signal à une valeur déterminable; – - : pas d’importance; – U : non initialisé.
Dans la pratique on évitera d’utiliser toutes ces valeurs si on veut limiter les problèmes à la synthèse. Par exemple les valeurs ‘L’ et ‘H’ ne peuvent être synthétisées « à l’intérieur » d’un FPGA, les résistances de tirage ne sont disponibles que sur les entrées sorties. Un bus de données bidirectionnel à l’extérieur du FPGA devra être séparé en deux bus dans le FPGA : un pour chaque direction.
En réalité on se limite à ‘0’ et ‘1’. Les valeurs ‘U’ et ‘X’ apparaissent dans les traces de simulation et nous avertissent d’un problème avec notre code (simulation ou synthèse).
Le type std_logic peut être étendu en tableau avec std_logic_vector très pratique pour représenter des bus.
Architecture de TapTempo
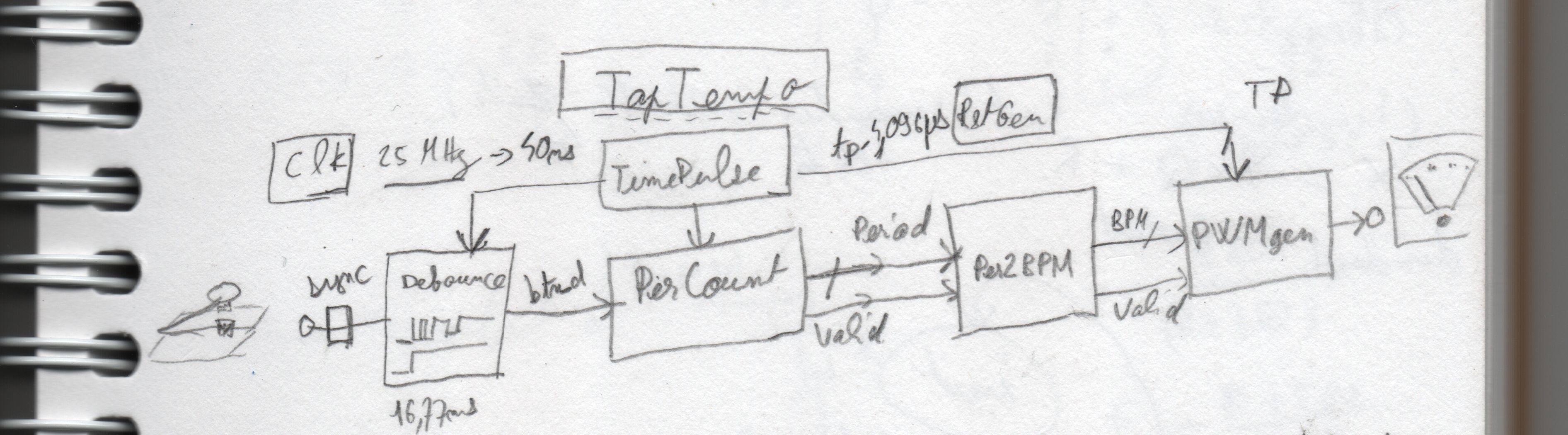
L’architecture global de TapTempo qui est exactement la même que celle de la version Verilog est présenté dans le schéma ci-dessous:
Le tempo en entrée est donné par une touche de morse
qui peut aisément être remplacé par un simple bouton poussoir (c’est d’ailleurs monté en parallèle du bouton de la colorlight). Cette entrée est synchronisée avec l’horloge du FPGA au moyen d’une double bascule en série pour éviter la métastabilité :
-- Synchronize btn
btn_sync_p: process (clk_i, rst)
begin
if rst = '1' then
btn_s <= '0';
btn_old <= '0';
elsif rising_edge(clk_i) then
btn_s <= btn_old;
btn_old <= btn_i;
end if;
end process btn_sync_p;
Le module debounce se charge ensuite de filtrer les rebonds et transfert le signal au module de mesure de la période d’appuis.
Cette période divise ensuite une constante de temps représentant le nombre de cycle de timepulse pour donner la fréquence en battement par minute (bpm).
Pour être « affichée », cette valeur est transformée en un signal périodique avec un rapport cyclique proportionnel au battement bpm.
Ce signal cyclique s’affiche ensuite très bien au moyen d’un voltmètre à aiguille comme celui-ci :
La graduation qui nous intéresse ici est celle qui va de 0 à 250.
Pour configurer les différentes constantes et définir des fonctions utiles, on utilise un « package » nommé taptempo_pkg.vhd qui sera inclus dans tous les modules du projet :
use work.taptempo_pkg.all;
La déclaration d’un package en VHDL s’effectue en deux temps :
on déclare d’abord les «objets» que l’on va utiliser dans le package :
-- La déclaration de ce que le package rend visible
package taptempo_pkg is
constant CLK_PER_NS : natural;
constant BPM_MAX : natural;
constant BPM_SIZE : natural;
constant TP_CYCLE : natural;
constant BTN_PER_MAX : natural;
constant BTN_PER_SIZE : natural;
constant BTN_PER_MIN : natural;
constant MIN_US : natural;
constant MAX_COUNT : natural;
constant DEBOUNCE_PER_US: natural;
constant DEB_MAX_COUNT : natural;
constant DEB_MAX_COUNT_SIZE : natural;
constant ZEROS : std_logic_vector(31 downto 0);
-- Usefull function for register size
function log2ceil(m : integer) return integer;
end package taptempo_pkg;
Puis on définit leurs valeurs et comportement dans le corps (body) :
package body taptempo_pkg is
constant CLK_PER_NS : natural := 40;
constant BPM_MAX : natural := 250;
-- period of tp in ns
constant TP_CYCLE : natural := 5120;
-- Debounce period in us
constant DEBOUNCE_PER_US: natural := 50_000;
constant DEB_MAX_COUNT : natural := (1000 * (DEBOUNCE_PER_US / TP_CYCLE));
constant DEB_MAX_COUNT_SIZE : natural := log2ceil(DEB_MAX_COUNT);
-- constant MIN_NS : natural := 60000000000;
constant MIN_US : natural := 60_000_000;
constant BPM_SIZE : natural := log2ceil(BPM_MAX + 1);
constant BTN_PER_MAX : natural := 1000 * (MIN_US / TP_CYCLE);
constant BTN_PER_SIZE : natural := log2ceil(BTN_PER_MAX + 1);
constant BTN_PER_MIN : natural := 1000 * (MIN_US / TP_CYCLE) / BPM_MAX;
constant MAX_COUNT : natural := TP_CYCLE / CLK_PER_NS;
constant ZEROS : std_logic_vector(31 downto 0) := x"00000000";
function log2ceil(m : integer) return integer is
begin
for i in 0 to integer'high loop
if 2 ** i >= m then
return i;
end if;
end loop;
end function log2ceil;
end package body;
Vous noterez la lourdeur d’avoir à déclarer le type de la constante dans le package avant de donner sa valeur dans le body. Les mauvaises langues diront que ça n’est pas beaucoup plus lourd que le C++ et ses doubles fichier (*.h et *.cpp) pour définir une classe.
Un cadenceur (timer) pour tout le système : Timepulse
Nous allons avoir besoin de compter le temps dans plusieurs blocs du projet. L’horloge câblée sur la colorlight est de 25Mhz. Comme nous n’avons pas besoin de précisions à la quarantaine de nanoseconde nous allons utiliser un compteur global pour générer des « pulses » toutes les 5,12µs. Ces pulses seront utilisés en entrée des blocs ayant besoin de compter le temps. Cela réduira la taille des compteurs puisqu’ils n’auront pas à repartir de l’horloge globale.
Le code est suffisamment concis pour que nous puissions le reproduire ici dans son intégralité.
library ieee;
use ieee.std_logic_1164.all;
use ieee.numeric_std.all;
use work.taptempo_pkg.all;
entity timepulse is
port (
-- clock and reset
clk_i : in std_logic;
rst_i : in std_logic;
-- timepulse output
tp_o : out std_logic
);
end entity timepulse;
architecture RTL of timepulse is
signal counter : natural range 0 to MAX_COUNT + 1;
begin
tp_o <= '1' when (counter = 0) else '0';
counter_p: process (clk_i, rst_i)
begin
if rst_i = '1' then
counter <= 0;
elsif rising_edge(clk_i) then
if counter < MAX_COUNT then
counter <= counter + 1;
else
counter <= 0;
end if;
end if;
end process counter_p;
end architecture RTL;
Tout module VHDL est constitué d’une partie entité entity pour décrire les interfaces d’entrées-sorties. Ici nous avons les deux entrées horloge clk_i et reset rst_i caractéristiques d’un système synchrone. L’unique sortie est le pulse généré toutes les 5,12µs.
La description du fonctionnement du module est donnée ensuite dans le bloc « architecture ». En plus des signaux d’entrées-sorties, il est possible de déclarer des signaux interne au bloc. Nous avons déclaré ici le signal counter qui est un entier naturel borné de 0 à MAX_COUNT + 1. La possibilité de borner les signaux que l’on déclare en integer permet d’aider l’outil de synthèse à générer un bus de taille adaptée quand on ne souhaite pas déclarer un std_logic_vector avec une taille explicite.
Attention, un signal n’a pas la même signification qu’une variable dans un programme procédural. Une variable prend une seule valeur qui changera au cours de l’exécution du programme. Un signal doit être vu comme une liste des différentes valeurs que prendra le signal au cours de la simulation. La première valeur de la liste sera son état initial, et à chaque événement sur le signal on ajoutera une valeur à la liste jusqu’à la fin de la simulation.
Nous aurions également pu déclarer des constantes à cet endroit, mais comme dit dans l’introduction, une constante étant un paramètre modifiable nous avons préféré le mettre dans le package taptempo_pkg.
Le corps de l’architecture de timepulse possède deux « process » concurrents qui s’exécutent en parallèle. Le premier est une assignation continue :
tp_o <= '1' when (counter = 0) else '0';
Il fait passer tp_o à ‘1’ quand le compteur counter atteint la valeur 0. Ce « process » est activé à chaque évenement/changement sur le signal counter.
Le second process est plus étoffé :
counter_p: process (clk_i, rst_i)
begin
--...
end process counter_p;
Ce process est exécuté à chaque événement surgissant sur les signaux déclarés dans la liste de sensibilité (ici clk_i et rst_i). Le contenu du process est quant à lui exécuté de manière séquentielle.
if rst_i = '1' then
--...
elsif rising_edge(clk_i) then
--...
end if;
Cette structure décrit une bascule D qui sera bien reconnue comme telle par le logiciel de synthèse. Un reset asynchrone ré-initialise le compteur à 0:
counter <= 0;
Et sur un front montant de l’horloge
elsif rising_edge(clk_i) then
on incrémente le compteur jusqu’à son maximum.
if counter < MAX_COUNT then
counter <= counter + 1;
else
counter <= 0;
end if;
Notez l’utilisation de l’opérateur d’affectation non bloquant <= qui n’affectera la valeur qu’à la fin de l’exécution du process.
Si par exemple nous avons le code suivant dans un process :
counter <= 10;
counter <= 5;
La valeur effective de counter à la fin de l’exécution de process sera 5. Et à aucun moment la valeur 10 n’apparaîtra dans counter.
Pour visualiser les signaux de sortie du module on pourra se rendre dans le répertoirecocotb/test_timepulse du projet et lancer le test en donnant ghdl comme simulateur:
$ cd test_timepulse
$ SIM=ghdl make
Le même principe pourra être appliqué pour simuler tous les autres modules de TapTempo.
La simulation consiste à laisser passer le temps pendant une miliseconde :
Le manipulateur morse génère des rebonds, le filtrage avait initialement été réglé à 20 ms sur la version Verilog. Pour être vraiment tranquille nous le monterons à 50 ms, mais c’est particulièrement long comme période. Comme pour le reste, cette configuration se trouve donc dans le package taptempo_pkg.vhd.
Le module debounce va se charger de filtrer les rebonds au moyen d’une machine à états et d’un compteur.
entity debounce is
port (
-- clock and reset
clk_i : in std_logic;
rst_i : in std_logic;
-- inputs
tp_i : in std_logic;
btn_i : in std_logic;
-- outputs
btn_o : out std_logic
);
end entity;
Le comptage des pulsations du module timepulse s’effectue dans un process :
counter_p: process (clk_i, rst_i)
begin
if rst_i = '1' then
counter <= 0;
elsif rising_edge(clk_i) then
if tp_i = '1' then
if (state_reg = s_cnt_high) or (state_reg = s_cnt_low) then
counter <= counter + 1;
else
counter <= 0;
end if;
end if;
end if;
end process counter_p;
La machine à états est constituée de 4 états :
type t_state is (s_wait_low, s_wait_high, s_cnt_high, s_cnt_low);
signal state_reg : t_state;
Deux états d’attentes et deux états de comptages. Dans un état d’attente s_wait_ on attend un front du bouton. Quand un front survient on passe dans un état de comptage s_cnt_.
Dans un état de comptage, le compteur s’incrémente et passe à l’état d’attente lorsqu’il arrive à son maximum.
De cette manière, seuls les fronts intervenant dans un état d’attente sont pris en compte. Une fois la machine à états dans un état de comptage, plus aucun front du bouton n’est « écouté ».
Le module percount (period counter) va compter le temps d’une période entre deux appuis sur le bouton.
Si on passe sur les signaux désormais bien connus clk_i, rst_i et tp_i; l’entrée du module est btn_i qui représente la valeur du bouton (appuyé ou non) sans rebond.
Les deux signaux de sortie sont : – Un vecteur btn_per_o représentant la valeur de la période mesurée – Un signal btn_per_valid donnant la validité de la valeur précédente. La valeur de btn_per_o est considérée comme bonne uniquement si btn_per_valid est à ‘1’.
Dans un premier process détecte les fronts descendants du bouton :
btn_fall <= btn_old and (not btn_i);
btn_p: process (clk_i, rst_i)
begin
if rst_i = '1' then
btn_old <= '0';
elsif rising_edge(clk_i) then
btn_old <= btn_i;
end if;
end process btn_p;
Puis dans un second process on compte le temps et on remet à 0 le compteur quand un front descendant du bouton surgit :
--...
elsif rising_edge(clk_i) then
if btn_fall = '1' then
counter_valid <= '1';
elsif counter_valid = '1' then
counter <= 0;
counter_valid <= '0';
elsif (tp_i = '1') and (counter < BTN_PER_MAX) then
counter <= counter + 1;
end if;
end if;
-- ...
C’est la partie « dure » du système, il va falloir faire une division d’une constante par la période mesurée.
Pour éviter d’avoir à utiliser les blocs multiplieurs dédiés de l’ECP5 et rester « portable » nous allons poser cette division comme on le ferait à la main.
Pour ce faire, on va mettre le dividende dans un registre nommé remainder (pour le reste) :
if to_integer(unsigned(btn_per_i)) < BTN_PER_MIN then
divisor <= std_logic_vector(to_unsigned(BTN_PER_MIN, BTN_PER_SIZE)) & ZEROS(DIVIDENTWIDTH-1 downto 0);
else
divisor <= btn_per_i & ZEROS(DIVIDENTWIDTH-1 downto 0);
end if;
Notez la la valeur minimum de btn_per_i qui nous évitera les problèmes de division par 0 ainsi que des valeurs de bpm trop élevées.
La division est cadencée par une machine à états de 3 états :
type t_state is (s_init, s_compute, s_result);
signal state_reg : t_state;
Un état initial pour démarrer, un état de calcul et un état durant lequel la valeur de sortie est considérée comme bonne.
L’algorithme de division consiste en une série de décalage à droite du diviseur :
divisor <= "0" & divisor(REGWIDTH-1 downto 1);
Et de décalages à gauche du quotient :
if (unsigned(divisor) <= unsigned(remainder)) then
remainder <= std_logic_vector(unsigned(remainder) - unsigned(divisor));
quotient <= quotient(REGWIDTH-2 downto 0) & "1";
else
quotient <= quotient(REGWIDTH-2 downto 0) & "0";
end if;
Avec ajout d’un ‘1’ ou d’un ‘0’ en fonction de la valeur du diviseur et du reste. Lorsque le reste est supérieur au diviseur, on le soustrait du diviseur et on ajoute un bit ‘1’ au moment du décalage du quotient. Sinon on ajoute le bit ‘0’ sans toucher au registre de reste (remainder).
Les registres remainder, divisor et quotient sont des std_logic_vector qui ne représente rien d’autre qu’un « paquet de bits » pour le langage. Si l’on souhaite effectuer des opérations de comparaison ou des additions soustraction dessus il faut donc dire au VHDL que ses bits représentent un nombre (ici non signé) en les « castant » avec unsigned(). Et si l’on souhaite assigner le résultat à un std_logic_vector il faut « caster » à nouveau avec std_logic_vector. Ces multiples conversion de type peuvent vite devenir un casse-tête quand on fait du VHDL.
L’esperluette & est ici un opérateur de concaténation de deux vecteurs std_logic_vector.
Le résultat de la division est donné en continu par les bits de poids faible du registre divisor :
La sortie « d’affichage » de la valeur consiste à générer un signal périodique pwm_o dont le rapport cyclique est proportionnel à la valeur de bpm_o.
On va pour cela compter de 0 à BPM_MAX :
-- count
count_p: process (clk_i, rst_i)
begin
if rst_i = '1' then
count <= BPM_MAX;
elsif rising_edge(clk_i) then
if tp_i = '1' then
if count = 0 then
count <= BPM_MAX;
else
count <= count - 1;
end if ;
end if ;
end if;
end process count_p;
Tant que la valeur du compteur se trouvera en dessous d’un seuil pwmthreshold elle sera à ‘1’, une fois le seuil dépassé elle passera à ‘0’:
Ce seuil ne doit pas changer de valeur pendant le comptage, on va donc devoir utiliser un registre intermédiaire bpm_reg pour stocker la valeur de bpm_i d’entrée :
-- Latching bpm_i on bpm_valid
bpm_register_p: process (clk_i, rst_i)
begin
if rst_i = '1' then
bpm_reg <= BPM_RESET;
pwmthreshold <= BPM_RESET;
elsif rising_edge(clk_i) then
if bpm_valid = '1' then
bpm_reg <= to_integer(unsigned(bpm_i));
end if;
if (count = BPM_MAX) then
pwmthreshold <= bpm_reg;
end if;
end if;
end process bpm_register_p;
Notez, à nouveau, la conversion d’un std_logic_vector (bpm_i) vers un entier naturel (bpm_reg) par le double « cast » to_integer(unsigned())
Synthèse, placement-routage et configuration
Nous voici arrivé à la véritable information de cette dépêche : il est désormais possible de faire de la synthèse VHDL avec un logiciel libre. Le VHDL est le langage avec lequel les étudiants français abordent le monde du FPGA en général. Je l’ai personnellement beaucoup pratiqué en utilisant ghdl pour la simulation et gtkwave pour visualiser les chronogrammes. Mais jusqu’à cette année, j’ai toujours dû passer sur les monstres propriétaires fournis gratuitement par les fabricants de FPGA pour la partie synthèse. Monstres de plusieurs dizaines de Giga-octets à télécharger, souvent précompilé pour une architecture 32 ou 64 bits mais pas les deux, incluant des machines virtuelles java et autres librairies graphique bugués quand on change la langue du système (coucou le MIG de Vivado). Quand ils ne sont tout simplement pas compatibles Linux (de plus en plus rare cependant). Bref, la synthèse VHDL n’était pas une sinécure.
La simulation n’était pas en reste non plus, car si GHDL fonctionnait plutôt bien, il n’était pas des plus rapides à l’époque. Et impossible de faire de la simulation mixte en mélangeant du VHDL et du Verilog.
Impossible également d’utiliser la formule 1 de la simulation qu’est Verilator, un simulateur un peu spécial qui converti son design en un objet C++, le testbench étant ensuite écrit comme du C++ «normal». Le rapport de performance est d’au moins 100 fois plus rapide.
Pour être honnête, signalons qu’il existe bien le logiciel français Alliance, mais c’est très orienté ASIC, et je n’ai jamais réussi à le faire fonctionner correctement. Peut-être que si des développeurs d’Alliance traînent sur LinuxFR, ils pourront nous en parler.
Bref, la lumière est arrivée cette année avec le développement du greffon ghdl pour yosys ainsi que les avancées à toute vapeur de la partie «synthèse» de ghdl. Comme nous allons le voir dans la section suivante.
GHDL + Yosys, la lune de miel
Pour pouvoir synthétiser TapTempo il va falloir compiler et installer les trois projet suivant :
GHDL : Le logiciel de simulation ainsi que de synthèse (ne pas oublier d’option de synthèse dans la configuration avant compilation) ;
Yosys : le logiciel de synthèse Verilog, véritable couteau suisse pour le FPGA et plus si affinité ;
ghdl-yosys-plugin : le greffon qui permet de compiler une librairie ghdl.so à copier dans le répertoire YOSYS_PREFIX/share/yosys/plugins/ de yosys.
Il est fortement conseillé de prendre les dernières versions du code des projets ci-dessus et de les compiler « à la main » car ces projets avancent vite et bougent beaucoup, les paquets des différentes distributions linux sont déjà largement obsolètes.
Une fois installé on peut lancer yosys avec le greffon ghdl comme ceci :
Et c’est tout ! Maintenant on peut reprendre les commandes et la procédure que l’on avait utilisée dans le cas de TapTempo en Verilog pour faire la synthèse, le placement routage et le chargement.
Notez que comme les sources ont été chargées et parsé dans yosys, il est parfaitement possible de le convertir en Verilog grâce à la commande write_verilog:
La version Verilog ainsi générée pourra être simulée avec verilator ou icarus par exemple pour faire de la simulation mixte, ou tout simplement pour accélérer la simulation dans le cas de verilator.
Pour synthétiser sur la colorlight qui est munie d’un FPGA ECP5 de chez Lattice, on utilisera la commande synth_ecp5 avec une sortie netlist au format json.
yosys> synth_ecp5 -json taptempo.json
[...]
=== taptempo ===
Number of wires: 540
Number of wire bits: 1515
Number of public wires: 540
Number of public wire bits: 1515
Number of memories: 0
Number of memory bits: 0
Number of processes: 0
Number of cells: 785
CCU2C 109
L6MUX21 9
LUT4 452
PFUMX 25
TRELLIS_FF 190
2.50. Executing CHECK pass (checking for obvious problems).
Checking module taptempo...
Found and reported 0 problems.
2.51. Executing JSON backend.
Arrivé à cette étape il peut être intéressant de comparer avec la version Verilog les ressources utilisées par le même projet :
$ yosys
yosys> read_verilog debounce.v per2bpm.v percount.v pwmgen.v rstgen.v taptempo.v timepulse.v
yosys> synth_ecp5 -json taptempo.json
...
=== taptempo ===
Number of wires: 487
Number of wire bits: 1435
Number of public wires: 487
Number of public wire bits: 1435
Number of memories: 0
Number of memory bits: 0
Number of processes: 0
Number of cells: 751
CCU2C 105
L6MUX21 1
LUT4 441
PFUMX 13
TRELLIS_FF 191
8.50. Executing CHECK pass (checking for obvious problems).
Checking module taptempo...
Found and reported 0 problems.
8.51. Executing JSON backend.
Nous obtenons un design légèrement plus petit avec la version Verilog, mais les ordres de grandeurs sont tout de même respecté.
Placement routage avec NextPnR
NextPnR est un logiciel de placement routage qui prend le schéma (netlist) de cellules «primitives» généré par le logiciel de synthèse et associe chaque cellule à une cellule disponible dans le FPGA. NextPnR effectue également le routage qui consiste à établir les connexions entre les différentes cellules.
C’est également à cette étape que l’on va préciser la configuration du FPGA (taille, IO…). En plus du fichier json de synthèse nous donnerons un second fichier de configuration des IO nommé taptempo.lpf décrivant nos trois signaux d’entrées-sortie :
LOCATE COMP "clk_i" SITE "P6";
IOBUF PORT "clk_i" IO_TYPE=LVCMOS33;
FREQUENCY PORT "clk_i" 25 MHZ;
LOCATE COMP "btn_i" SITE "M13";
IOBUF PORT "btn_i" IO_TYPE=LVCMOS33;
LOCATE COMP "pwm_o" SITE "P4";
IOBUF PORT "pwm_o" IO_TYPE=LVCMOS33;
Toutes les commandes de synthèse données ici sont bien évidemment disponibles dans un Makefile sur le dépot. Pour faire le placement routage nous pourrions taper la commande suivante :
Qui ne donnera pas le fichier de configuration nommé bitstream permettant de configurer le FPGA !
Car les spécifications des FPGA sont gardées jalousement par les constructeurs, et il faut des heures et des heures d’ingénieries inverses pour venir à bout de ces informations. Travail qui a été effectué via le projet Trellis et qui nous permet de convertir la sortie texte précédente taptempo_out.config en un bitstream reconnu par l’EPC5 :
$ ecppack taptempo_out.config taptempo.bit
Et l’on décroche enfin le Saint Grââl permettant de configurer la colorlight : le bitstream taptempo.bit.
En avant la musique avec openFPGALoader
Arrivé à cette étape il serait vraiment dommage d’être contraint de relancer l’ide proprio du constructeur juste pour télécharger le bitstream dans le FPGA via une sonde USB-Jtag !
C’est là que l’on peut dégainer le projet openFPGALoader qui a pour ambition de permettre la configuration de tous les FPGA existant avec toutes les sondes disponibles sur le marché.
Le VHDL est très verbeux, les évolutions du langage ont tenté de corriger un peu le tir mais cela reste tout de même verbeux. Certaine caractéristiques comme l’insensibilité à la casse font un peu penser à un langage d’un autre âge. Cependant, l’héritage du langage Ada fait de VHDL un langage très strict et déterministe de part sa conception contrairement au Verilog.
Le typage fort peut-être considéré à première vu comme un défaut ralentissant l’écriture du code. Mais il n’en est rien, après avoir souffert de « compiler » votre porte-gramme pour la simulation, vous aurez l’agréable surprise de voir votre système fonctionner parfaitement sur le FPGA du (presque) premier coup.
Le vocabulaire VHDL est très vaste et on se contente en général des structures de code connue dont on sait qu’elles « synthétiseront » correctement, ce qui donne une impression de ne jamais pouvoir atteindre la maîtrise du langage.
Il y a quelques années je m’étais posé la question de la popularité du VHDL par rapport au Verilog. En effet, même si le VHDL est presque aussi bien supporté que le Verilog par les outils des constructeurs, ça n’était pas le cas des logiciels libres. C’est encore largement le cas aujourd’hui, même certain logiciels non libre supportent en priorité le Verilog. Le constructeur Gowin par exemple ne permettait que la synthèse Verilog avec son outil maison. Il fallait installer le logiciel tier synplify de synopsis pour pouvoir accéder à la synthèse VHDL.
Cette extension de ghdl pour Yosys change la donne. Car, comme nous l’avons vu, il est possible de l’utiliser pour convertir son projet en Verilog et avoir accès à tous l’écosystème libre Verilog. Il est également possible de faire de la vérification formelle pour le VHDL.
Avoir la compétence VHDL dans son CV est une assez bonne idée car c’est souvent par ce mot que l’on résume le développement ASIC/FPGA/SoC. En Europe, le VHDL est très apprécié de l’industrie et particulièrement de l’industrie de défense.
Mais si c’est juste pour mesurer le tempo, ce n’est peut-être pas la voie la plus rapide et la plus simple 😉
«I’m leading the Open Hardware section of a European Commission study on open source software and hardware. This is really exciting and important work, as the final report (due early next year) will be used to form European Commission policy on both open source software and open hardware for the next decade. #opensource#openhardware
As part of the study, we’re asking people to complete a survey, which you can find here:
You don’t have to be based in the EU to participate, and you don’t have to complete all questions.
If you have an interest in the future of Open Source Software or Hardware, please take a look, and please forward to any contacts or colleagues whom you think may also be interested.
Il y a plus de deux ans et demi maintenant, mzf publiait un journal sur le site LinuxFR parlant de son projet «TapTempo». L’objectif de son programme était simplement de mesurer la cadence d’une musique en tapant sur une touche de son clavier, le résultat s’affichant simplement dans la console.
Ce journal fut le point de départ d’une série de «projets TapTempo» proposé par les lecteurs du site dans à peu prêt tous les langages informatique possible… Mais pas le Verilog.
Voici donc la lacune comblée avec TapTempo en Verilog.
Le projet TapTempo semble faiblir depuis quelques mois maintenant. En panne de langage informatique pour en faire une dépêche ? Laissez‑moi vous présenter un langage assez particulier puisqu’il ne sert pas à faire de la programmation. Ce langage permet de décrire le comportement numérique d’un composant électronique (on parle alors de langage de description de matériel — HDL) : le Verilog.
C’est aussi un langage utilisé pour faire de la synthèse numérique sur les circuits logiques programmables (FPGA). Dans cet exemple, nous utiliserons la carte de développement à bas coût ColorLight 5A‑75B.
Le Verilog est un langage conçu à l’origine pour rédiger des spécifications de circuits logiques en électronique numérique. Le langage permet de décrire le comportement de sortie par rapport à des entrées logiques.
Un peu comme les logiciels de saisie de schéma électronique, le Verilog est très hiérarchique, on décrit des modules avec leurs entrées-sorties. Que l’on assemble ensuite dans d’autres modules pour finir dans un module « top » qui décrit le composant final.
Dans le cas de TapTempo, le module « top » est déclaré comme ceci :
Le module possède deux entrées : l’horloge (clk_i) et le bouton (btn_i) ainsi qu’une sortie pwm (pwm_o) pour l’affichage. Les paramètres seront vus comme des constantes au moment de la simulation, ils permettent de configurer les composants en fonction de la cible.
Le changement de valeur des signaux se fait dans des processus qui sont déclenchés sur événement. Ces processus sont décrits au moyen du mot clef always@() en Verilog. Par exemple, dans le code suivant:
L’événement déclencheur du process est le front montant de l’horloge clk_i. À chaque fois qu’un front montant d’horloge se présente, le processus est exécuté de manière séquentielle.
L’opérateur <= est l’opérateur d’affectation dit « non bloquant ». Cela signifie que la valeur ne sera effectivement appliquée qu’a la fin de l’exécution du process. Donc la valeur du signal btn_old ne sera pas nécessairement égale à btn_i à la ligne du if() comme on aurait pu instinctivement le croire.
Le langage Verilog a beaucoup de succès dans le monde du logiciel libre. En effet il est relativement peu verbeux et ressemble au C pour de nombreux aspects.
Il est par exemple possible de décrire des macros de la même manière qu’en C, il suffit de remplacer le symbole # par ` pour créer des constantes qui seront remplacées par le pré-processeur.
/* count tap period */
`define MIN_NS 60_000_000_000
`define BTN_PER_MAX (`MIN_NS/TP_CYCLE)
`define BTN_PER_SIZE ($clog2(1 + `BTN_PER_MAX))
Le Verilog reprend également les opérateurs booléen et binaire &,&&, |,||, etc. du C.
C’est le langage HDL le mieux supporté par les différents logiciels libres. Si l’on souhaite se lancer dans le domaine des FPGA et/ou des ASIC, il est préférable de commencer par lui. C’est également le langage « de sortie » de quasiment tous les générateurs de code HDL.
Architecture de TapTempo
L’outil indispensable pour commencer un projet en Verilog est… le papier et le crayon. Il est en effet indispensable d’avoir une vue d’ensemble assez claire de ce que l’on souhaite réaliser avant de se lancer dans le code.
Voici donc l’architecture générale du composant TapTempo :
Même si l’on doit revenir plusieurs fois (ce qui est le cas ici puisque les constantes ne sont pas à jour) sur ce schéma général en cours de développement, cette partie est très importante. Si elle est bien pensée, le reste coule de source.
Le composant va nécessiter quelques compteurs, mais l’horloge utilisée ici étant très rapide nous allons d’abord factoriser le comptage au moyen du module nommé timepulse, ce module va distribuer un pulse qui servira de base aux autres compteurs pour leur fonctionnement interne.
L’entrée utilisateur se compose d’un bouton (touche télégraphique « morse »). Les fronts montant et descendant de cette entrée n’étant pas synchronisés sur l’horloge du système nous allons devoir le faire au moyen de deux bascules en série pour éviter la métastabilité.
/* Synchronize btn_i to avoid metastability*/
reg btn_old, btn_s;
always@(posedge clk_i or posedge rst)
begin
if(rst) begin
btn_old <= 1'b0;
btn_s <= 1'b0;
end else begin
btn_old <= btn_i;
btn_s <= btn_old;
end
end
Le second problème que pose notre entrée est que l’appui sur le bouton ne génère pas des changements francs de son état. Chaque « appui et relâche » génère une série de rebonds et donc une série de 0 et de 1 avant de se stabiliser. Pour lisser le signal il va donc falloir faire passer le signal dans le bloc « anti-rebond » debounce.
Le bloc percount va ensuite se charger de mesurer le temps entre deux appuis sur le bouton. Cette période va devoir être transformée en fréquence « BPM » (Beat Per Minute) via le module per2bpm puis en une valeur pseudo-analogique (PWM) grâce au module pwmgen.
La carte cible ne possédant pas de bouton « reset », il va falloir le générer grâce au module rstgen de manière à s’assurer de l’état de départ de notre système au démarrage.
Entrée sortie
La plupart des programmes TapTempo proposés jusqu’ici supposaient – en plus d’un CPU – la présence d’un clavier et d’une console texte de sortie (avec toute la pile de pilotes et de système d’exploitation associés). Ici, nous allons devoir tout définir dans le « portegramme » – Dans l’industrie on va parler d’IP pour Intellectual Property, quel horrible nom –.
L’idée est donc de simplifier au maximum l’entrée « clavier » et la sortie histoire de pouvoir les décrire simplement.
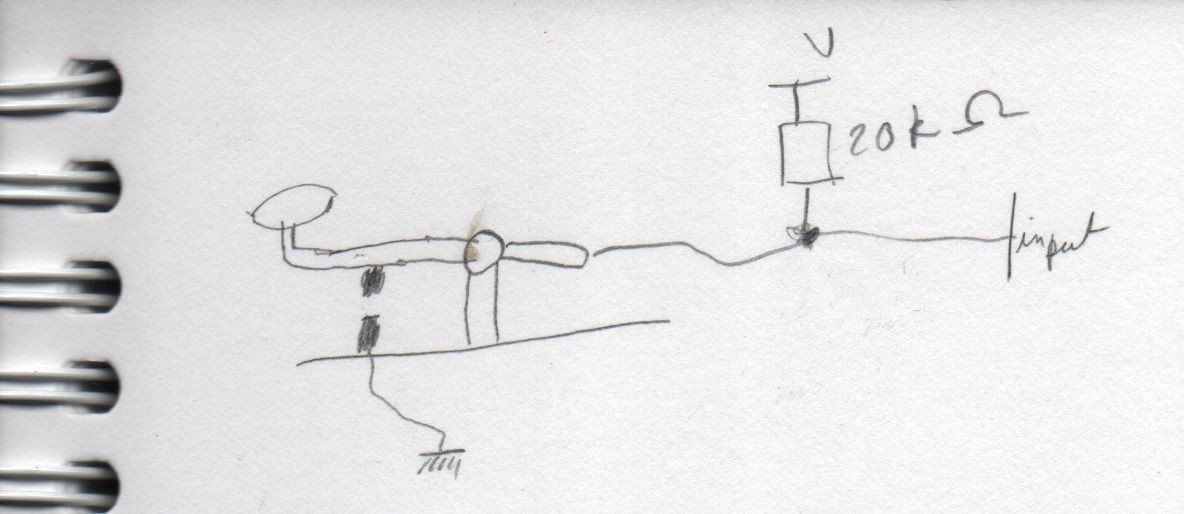
Pour l’entrée nous allons nous contenter d’un contact de type bouton, ou d’une touche de type télégraphe « morse ».
Comme on peut le voir dans le schéma ci-dessus, quand la touche est appuyée, l’entrée « bouton » est mise à la masse et donne un niveau logique à 0 sur notre système. Lorsque l’on relâche le bouton, la résistance de tirage ramène le niveau de tension à Vcc pour avoir un niveau 1 sur l’entrée.
Pour la sortie, l’idée de mettre un écran complexifie énormément le système. En effet, il est nécessaire de faire une machine d’état assez complexe pour initialiser l’écran puis rafraîchir l’affichage. Il est souvent nécessaire d’ajouter un processeur « soft » rien que pour ça d’ailleurs. (Bon il est vrai que le VGA n’est pas si compliqué, mais il reste plus complexe que la solution proposée ici).
Non, l’idée ici est d’utiliser les graduations de l’antique voltmètre à aiguille trouvé dans une cave et qui gradue de 0 à 300 comme on peut le voir sur la photo :
Et comme un système numérique ne sort que des 0 et des 1 sur ses broches, on va « simuler » une valeur analogique au moyen d’une PWM (Pulse With Modulation). Il suffit de changer le rapport cyclique entre le temps haut et le temps bas de notre signal pour faire varier la tension moyenne qui sera vue par le voltmètre. Si on l’ajuste correctement avec une résistance en série, il est relativement facile de forcer la valeur maximale (5V) à 250.
La période de la pwm sera configurée suffisamment rapide pour que l’aiguille n’oscille pas.
Le module ne prend pas de valeur d’entrée hormis l’horloge et le reset qui sont de rigueur dans tout le projet. Son signal de sortie tp_o est une pulsation de l’horloge émise toutes les 5120 ns :
Puis on compte de manière synchronisée avec l’horloge :
always@(posedge clk_i or posedge rst_i)
begin
if(rst_i)
begin
counter <= 0;
end else begin
if (counter < `MAX_COUNT)
begin
counter <= counter + 1'b1;
end else begin
counter <= 0;
end
end
end
La pulsation est émise lorsque le compteur passe par 0 :
L’entrée de ce module est le signal de bouton préalablement synchronisé avec l’horloge du système btn_s. Le compteur utilisera la pulsation tp_i généré par le module timepulse décrit ci-avant.
La sortie du module est un signal btn_o proprement lissé. La période de temporisation de 20 ms est donné ici en paramètre DEBOUNCE_PER_NS.
Les transitions de la machine d’états sont données dans le code ci-dessous dans un processus dit « combinatoire » (always@*) par opposition à un processus « synchrone ».
Le principe de « lissage » des rebonds est donc le suivant : Dans l’état initial s_wait_low on attend que le bouton passe à la valeur 1. Lorsque le signal passe à 1, on change d’état pour s_cnt_high.
Le passage dans l’état s_cnt_high a pour effet de faire passer le signal de sortie à 1 et déclencher le compteur. Tant que le compteur compte et n’a pas atteint la valeur MAX_COUNT, on reste dans cet état quelles que soient les variations du signal d’entrée. Lorsque le compteur atteint la valeur maximale, la machine d’état passe dans l’état s_wait_high (en attente de valeurs hautes).
Dans l’état s_wait_high on surveille la valeur du bouton d’entrée, si elle passe à 0 on change d’état pour s_cnt_low.
De manière symétrique à s_cnt_high on déclenche donc le compteur en ignorant la valeur d’entrée. Et, lorsqu’elle atteint son maximum on passe à l’état initial s_wait_low.
La valeur « lissée » du bouton en sortie est donnée par l’état de la machine d’état :
L’interface du module percount se compose des entrées habituelles d’horloge clk_i, de reset rst_i ainsi que de la pulsation tp_i.
Le signal de mesure en entrée est btn_i et la sortie est un vecteur btn_per_o donnant la valeur mesurée. La valeur est considérée comme valide uniquement lorsque la sortie btn_per_valid est à 1. Cette astuce permet d’économiser un registre si la sauvegarde de la valeur mesurée est inutile comme c’est le cas ici.
Maintenant que nous avons un signal de bouton btn_b propre et lissé, nous pouvons entamer la mesure de la période entre deux appuis au moyen de… devinez quoi ? D’un compteur pardi !
Il nous faut tout d’abord détecter le front descendant du bouton :
reg btn_old;
wire btn_fall = btn_old & (!btn_i);
always@(posedge clk_i or posedge rst_i)
begin
if(rst_i)
btn_old <= 1'b0;
else
btn_old <= btn_i;
end
Le signal btn_fall sert de remise à zéro du compteur ainsi que de validation de la valeur de sortie :
always@(posedge clk_i or posedge rst_i)
begin
if(rst_i)
begin
counter <= 0;
end else begin
if(btn_fall) begin
counter_valid <= 1'b1;
end else if(counter_valid) begin
counter <= 0;
counter_valid <= 1'b0;
end else begin
/* stop counting if max, count tp_i */
if(tp_i && counter < `BTN_PER_MAX)
counter <= counter + 1'b1;
end
end
end
Le compteur compte le nombre de pulsations de tp_i jusqu’à atteindre la saturation BTN_PER_MAX. Si un front montant du bouton se présente avec btn_fall, on valide le compteur avec counter_valid. Et si le signal de validation passe à 1 (donc le coup d’horloge suivant) on remet le compteur à zéro et on recommence à compter.
Calcul de la fréquence en Beat Per Minute (per2bpm)
Avec le module per2bpm on arrive dans la partie critique du projet, car il va nous falloir faire une division. On entre une période dans le module :
La division (tout comme la multiplication) est un point sensible en Verilog. En effet, l’opérateur de division existe bien dans le langage et il se peut que cela simule parfaitement.
C’est lorsque arrivera l’étape de la synthèse que l’on risque d’avoir quelques surprises. Il est possible que certains logiciels de synthèse réussiront à faire quelque chose en un coup d’horloge. Mais il est certain que cela se fera au prix de très mauvaises performances en matière de ressources utilisées et de fréquence d’horloge. Il est surtout probable que votre logiciel de synthèse jette l’éponge.
Pour réaliser cette division, nous allons donc en revenir aux fondamentaux appris au primaire et poser la division. Une division, c’est la recherche du Quotient et du Reste de l’équation suivante :
La division s’effectue avec une série de soustraction du reste (remainder) et de décalage du diviseur.
À l’étape initiale, on place le diviseur à gauche du registre divisor et le dividende dans le reste remainder :
divisor <= {btn_per_i, (`DIVIDENTWITH)'h0};
remainder <= `MIN_NS/TP_CYCLE;
// le résultat est initialisé à 0:
quotient <= 0;
Puis on effectue une série de comparaison-soustraction-décalage avec l’algorithme comme décrit ci-dessous :
si le diviseur (divisor) inférieur ou égal au reste (remainder), on soustrait le reste avec le diviseur et on décale le quotient à gauche en ajoutant 1 :
La génération du signal pseudo analogique décrite en introduction est presque la partie la plus simple.
On compte (oui encore) de 0 à 250 (BPM_MAX) :
/* count */
always@(posedge clk_i or posedge rst_i)
begin
if(rst_i)
count <= BPM_MAX;
else begin
if(tp_i)
begin
if (count == 0)
count <= BPM_MAX;
else
count <= count - 1'b1;
end
end
end
Et on passe le signal de sortie pwm_o à 1 lorsque le compteur est inférieur à la fréquence demandée :
assign pwm_o = (count <= pwmthreshold);
Il y a juste une subtilité consistant à sauvegarder la valeur de la fréquence donnée en entrée dans deux registres pwmthreshold et bpm_reg :
reg [($clog2(BPM_MAX+1)-1):0] bpm_reg;
reg [($clog2(BPM_MAX+1)-1):0] pwmthreshold;
/* Latching bpm_i on bpm_valid */
always@(posedge clk_i or posedge rst_i)
begin
if(rst_i)
begin
bpm_reg <= 0;
pwmthreshold <= 0;
end else begin
if(bpm_valid)
bpm_reg <= bpm_i;
if(count == BPM_MAX)
pwmthreshold <= bpm_reg;
end
end
Le premier registre bpm_reg est mis à jour lorsque le signal d’entrée bpm_valid est à 1. Pour mémoriser la valeur d’entrée et pouvoir l’utiliser au moment où l’on en a besoin. Et le second pwmthreshold est rafraîchi en fin de cycle d’une période de la pwm. Pour éviter d’avoir un changement de valeur en cours de période, et donc un rapport cyclique faux.
Simulation de l’ensemble avec Cocotb
Jusqu’ici nous avons décrit le comportement du composant final en Verilog. Toutes les développeuses ou développeurs HDL le savent très bien, il est impossible de réaliser un projet Verilog (ou autre HDL) sans faire un minimum de simulation.
Pour simuler le composant, il est nécessaire de décrire les stimuli en entrée du composant et de lire/valider les sorties. On va généralement créer un composant hiérarchiquement au-dessus du top de notre composant appelé « testbench » dans lequel nous décrirons les changements de valeurs des entrées au cours du temps. Cette partie peut tout à fait se faire en Verilog.
Cependant, l’idée de mélanger la partie banc de test et composant « synthétisable » n’est pas terrible. En effet on va très vite confondre les deux parties et mélanger les codes. L’exemple de la division est criant : l’opérateur diviser « / » fonctionne très bien dans la partie testbench mais elle pose de gros problèmes dans la partie « synthétisable ».
Pour éviter ce mélange des genres, une solution radicale consiste à utiliser un autre langage pour la partie banc de test. Le C++ et le SystemC sont utilisés depuis longtemps pour cela. S’ils sont utilisés en conjonction avec Verilator ils permettent d’atteindre des puissance/rapidité de simulation inégalées par les simulateurs « propriétaires ».
Une autre méthode consiste à piloter le simulateur Verilog avec un autre programme, on parle alors de cosimulation. C’est le cœur du fonctionnement du module python CocoTB. L’idée ici est d’écrire son banc de test en python, ce qui est nettement plus confortable que du Verilog ou même du C++ (SystemC est une librairie C++ également).
Le testbench pour simuler l’ensemble du projet taptempo se trouve dans le répertoire cocotb/test_taptempo. Pour le simuler il suffit de s’y rendre et d’y exécuter un make. À condition cependant d’avoir installé cocotb (en python3) et Icarus pour la partie simulateur (On laissera l’appréciation de l’installation au lecteur en fonction de ses affinités linuxdistributive).
La simulation consiste à tester trois appuis sur le bouton à des intervalles différents :
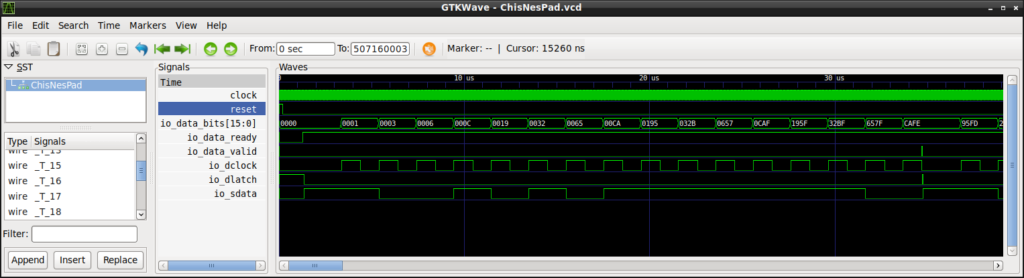
Cela génère un fichier de « traces » au format VCD particulièrement volumineux de 2,3 Go (qui se compresse à 70 Mo avec xz !) permettant de visionner les signaux au cours du temps grâce à gtkwave:
$ gtkwave -g taptempo.vcd
Et donne la trace suivante :
Cette simulation est particulièrement longue (il m’a fallu environ une heure et demie sur mon vieux T430) et génère un fichier de trace monstrueux. En phase de développement on va généralement lancer de petites simulations par modules comme on peut le voir pour le module debounce dans le répertoire cocotb/test_debounce. On changera également certaines constantes de temps pour limiter les « pas » de simulation consommant inutilement du calcul processeur.
Il est également possible de laisser l’ordinateur écrire les stimuli grâce à la méthode de preuve formelle. C’est la méthode qui a été utilisée ici pour les modules. Les fichiers de configuration se trouvent dans le répertoire formal/*.
Synthèse sur ColorLight
La Colorlight n’est pas initialement une carte de développement pour les FPGA. C’est une carte permettant de piloter des panneaux de LED qui nous agressent un peu partout dans les rues commerçantes. Cependant, un petit malin s’est rendu compte qu’elle était munie d’un FPGA de chez Lattice : l’ECP5.
Ce FPGA possède deux gros avantages :
il est relativement gros, suffisamment pour posséder des multiplieurs câblés, des sérialiseurs-désérialiseurs…
on peut développer dessus avec une chaîne de développement intégralement opensource !
Jusqu’à la colorlight, les kits de développement ECP5 n’étaient pas donnés puisque les premières cartes débutaient à 100 $ minimum. Mais avec la colorlight, on tombe à 15 $, ce qui en fait un kit de développement ultra bon marché pour se faire la main avec des FPGA.
Et comme tout est opensource, il est aisé d’aller installer les logiciels permettant de synthétiser TapTempo sur sa distribution Linux préférée. L’explication de l’installation des outils est hors de propos de cet article (un article détaillé sur la colorlight est disponible dans le Hackable 35), mais une fois les outils installés, il suffit de se rendre dans le répertoire synthesis/colorlight du projet et de faire make :
On voit ici que les ressources utilisées pour TapTempo sont ridicules par rapport au FPGA utilisé. La curieuse ou le curieux qui voudra « voir » le placement routage dans le FPGA utilisera l’option --gui dans la commande NextPnR pour avoir l’interface graphique :
N’hésitez pas à me proposer des demandes d’intégration Git pour améliorer le projet.
Conclusion
On voit que dès que l’on passe dans le domaine de l’embarqué les choses se compliquent et prennent plus de temps. Alors que sur un PC on aurait pu faire ça en une ligne de code, quand on embarque ça dans un microcontrôleur, c’est déjà plus compliqué. Mais si l’on passe dans le monde des FPGA et des ASIC, le projet prend une toute autre dimension. C’est la raison pour laquelle il faut toujours se demander si un FPGA est bien à propos pour notre projet, non seulement cela coûtera plus cher en composant qu’une solution sur étagère, mais en plus le temps de développement (et donc le coût) sera nettement supérieur.
L’idée d’utiliser une touche de télégraphe pour mesurer le tempo n’était peut‑être pas la meilleure, compte tenu des rebonds qui sont relativement violents. Même avec le module lisseur de rebond (debounce), il subsiste quelques rebonds trop longs. Un tempo maximum à 250 n’est pas si rapide et l’on est vite frustré de l’atteindre alors qu’on pourrait mesurer des tempos de musiques plus… rythmées. On peut facilement passer à 300, mais ça reste lent. Si l’on veut un tempo plus rapide, il faut tout d’abord changer la graduation sur le voltmètre, puis modifier le paramètre BPM_MAX dans le code.
On a ici un modèle de projet qui est facile à synthétiser sur n’importe quel petit FPGA. C’est un projet qui peut être intéressant si l’on souhaite se sortir un peu les doigts des LED qui clignotent. La démonstration étant faite du fonctionnement de l’architecture globale, il est aisé de s’en servir pour la réécrire dans d’autres langages de description de matériel comme le VHDL, Chisel (même s’il y en a déjà une pour taptempo), Migen/Litex, MyHDL, Clash (en plus, ça permettrait de débloquer la dépêche LinuxFr.org sur le sujet)…
Pour le curieux, ou la curieuse, qui sera allé voir le code sur le projet GitHub, ce projet a été développé avec une dose de preuves formelles grâce au logiciel libre Yosys-SMTBMC.
C’est dans la soirée du 8 juillet que l’annonce est tombée : la version 1.4.0 de CocoTB est sortie. Cette nouvelle version est une belle évolution de Cocotb avec une bonne intégration dans le système de paquets de Python ainsi que l’abandon de la prise en charge de Python 2. On peut aujourd’hui dire que CocoTB est une alternative sérieuse pour écrire ses bancs de test HDL.
CocoTB est une bibliothèque de cosimulation permettant d’écrire (en Python) des bancs de test pour la simulation numérique HDL (Hardware Description Language). Historiquement, les deux langages de descriptions HDL que sont Verilog et VHDL embarquent tout le nécessaire pour écrire des stimuli permettant de tester le composant en simulation. Cela permet d’avoir un seul langage pour décrire le composant et le tester. Le simulateur exécutera tout cela sans problème.
Mais cela amène beaucoup de confusion entre la partie du langage utilisable pour la simulation uniquement et la partie « description du matériel ». Dans le cas de la partie « matériel » on parle alors de code « synthétisable ». Cette confusion entre du code synthétisable ou non est source de grandes frustrations au moment de passer à la synthèse. En effet, cette belle structure de données que l’on aura développée et testée aux petits oignons s’écroulera au moment de la synthèse quand on se rendra compte que le code n’est pas synthétisable. Il faudra tout reprendre.
Une des idées derrière CocoTB est donc de changer de langage pour la simulation, comme cela les choses sont claires : on utilise le VHDL ou Verilog pour la partie du composant qui est synthétisable, et on passe au Python pour le banc de test. Ce n’est pas le seul logiciel à proposer ce genre d’approche. Avec Verilator, par exemple, on va écrire toute la partie banc de test en C++ ou en SystemC. La partie synthétisable sera écrite en Verilog et convertie en un objet C++ par Verilator.
La seconde idée de CocoTB est de ne pas réinventer la roue en réécrivant un énième simulateur HDL. Ce qui évite également d’avoir à choisir son camp entre Verilog et VHDL ou les deux (simulation mixte). Non, CocoTB va se contenter de piloter les simulateurs disponibles sur le marché. Les simulateurs libres que sont GHDL, Icarus et Verilator sont naturellement pris en charge, même si dans le cas de Verilator c’est très récent. La plupart des simulateurs commerciaux le sont également, ce qui est un argument pour l’introduire dans son bureau d’étude. En effet, les managers sont en général moyennement chauds pour virer un logiciel acquis à grands frais. Et l’on peut continuer à profiter des interfaces proposées par notre simulateur habituel pour exécuter le simulateur, visionner les chronogrammes, faire de la couverture de tests, etc. La version 1.4 de CocoTB introduit la gestion complète du simulateur Aldec Active HDL qui vient s’ajouter aux classiques de Cadence et de Mentor, Modelsim…
Les changements dans le code
Un gros changement initié depuis quelque versions déjà est l’utilisation du mot clef async en lieu et place du yield et du décorateur @coroutine. Python 3 gérant désormais l’asynchronisme, CocoTB l’utilise et le prend désormais complètement en charge. L’exemple donné dans le courriel de la publication est le suivant :
@cocotb.test()
async def my_first_test(dut):
"""Try accessing the design."""
dut._log.info("Running test!")
for cycle in range(10):
dut.clk <= 0
await Timer(1, units='ns')
dut.clk <= 1
await Timer(1, units='ns')
dut._log.info("Running test!")
Qui se serait écrit comme cela dans « l’ancien système » :
@cocotb.test()
def my_first_test(dut):
"""Try accessing the design."""
dut._log.info("Running test!")
for cycle in range(10):
dut.clk <= 0
yield Timer(1, units='ns')
dut.clk <= 1
yield Timer(1, units='ns')
dut._log.info("Running test!")
Cette écriture restant cependant valable.
Le gros avantage de cette nouvelle écriture est de ne plus avoir a réinventer la roue avec des décorateurs inutiles. Avec async et await, on utilise des interfaces intégrées à Python 3, ce qui évite tout un travail de gestion.
Installation
CocoTB est, depuis maintenant un certain temps, partie intégrante du système de gestion de paquets de Python pip. Et vous pouvez dès à présent l’installer sur votre système via la commande pip install :
$ python -m pip install cocotb
# Pour celles et ceux qui ont installé la version précédente n’oubliez pas le --upgrade
$ python -m pip install --upgrade cocotb
Et on peut vérifier la version grâce à la commande cocotb-config suivante :
cocotb-config --version
1.4.0
En plus de votre composant écrit en VHDL ou Verilog, deux fichiers supplémentaires sont nécessaires pour tester avec CocoTB : le Makefile et le script Python de test proprement dit.
Avec cette nouvelle version, le Makefile a encore été simplifié puisqu’il n’est plus nécessaire d’intégrer les en‑têtes C++. Ces en‑têtes sont nécessaires pour compiler les interfaces VPI/VHPI/FLI qui permettent de piloter les simulateurs. On compile désormais cette partie à l’installation de CocoTB. Dans les précédentes version, cette compilation ce faisait à chaque fois que l’on relançait les tests.
Si l’on prend l’exemple de l’antirebond en Verilog du Blinking Led Project, nous avons le Makefile suivant :
SIM=icarus # Nom du simulateur
export COCOTB_REDUCED_LOG_FMT=1 # Pour avoir des traces de log qui rentre dans l’écran
VERILOG_SOURCES = $(PWD)/../src/button_deb.v # Inclusion des fichiers HDL
TOPLEVEL=button_deb # Nom de l’entité
MODULE=test_$(TOPLEVEL) # Nom du script Python de test
include $(shell cocotb-config --makefile)/Makefile.sim
L’exemple est un composant permettant de ne pas compter les rebonds d’un bouton comme des appuis successifs. Le script de test en Python se trouve dans le dépôt Git du projet et se nomme test_buton_deb.py. Pour le lancer, il suffit de se rendre dans le répertoire blp/verilog/cocotb/ et de taper make :
$ make
[...]
0.00ns INFO Running test!
0.00ns INFO freq value : 95000 kHz
0.00ns INFO debounce value : 20 ms
0.00ns INFO Period clock value : 10000 ps
0.02ns INFO Reset complete
Un fichier de traces (chronogrammes) button_deb.vcd au format VCD est créé. Il peut être visionné en « temps réel » alors même que la simulation n’est pas terminée, grâce au visualiseur gtkwave :
$ gtkwave button_deb.vcd
Une organisation qui tourne
Le projet CocoTB est chapeauté par la FOSSi foundation qui fournit le « chef de projet » Philipp Wagner ainsi que des moyens financiers pour faire tourner des machines virtuelles de tests ainsi que pour payer les licences des simulateurs commerciaux.
Les statistiques de modification de cette version sont les suivantes :
Ces chiffres montrent que CocoTB est un projet qui fédère désormais une grosse communauté. C’est un projet mature qui compte dans le paysage des logiciels libres pour le matériel (FPGA et ASIC).
La libération des FPGA s’accélère à grands pas, il devient presque difficile de suivre toutes les nouvelles sur le sujet. Mais les FPGA ne doivent pas nous faire oublier leurs grands frères que sont les ASIC. Un FPGA est un composant ayant un silicium déjà « gravé » mais où il est possible de reconfigurer les connexions entre les éléments logiques à volonté. Dans le cas d’un ASIC, on va cette fois graver directement les transistors sur un silicium vierge et les relier via des couches métaliques une fois pour toutes. Il ne faut surtout pas se planter à l’étape de conception car on ne pourra pas modifier les interconnexions une fois la production lancée.
Pour réaliser un ASIC, il faut fournir un plan des masques de chaque couche de dopage du silicium ainsi que des couches métaliques. Voici par exemple la représentation d’une bascule D :
Pour ce faire, on va partir d’une description RTL (Register Transfert Level) du composant, similaire aux descriptions utilisées pour les FPGA – la plupart du temps du Verilog ou du VHDL — que nous allons « synthétiser » en une Netlist. La suite va ressembler (de loin) à du placement‐routage et de la simulation analogique‐numérique, comme on peut le voir avec la conception de carte électronique.
Le flot de conception typique du monde du matériel est donné dans une des diapositives de la présentation de Tim Ansell ci‑dessous :
La partie langage de description du matériel et simulation est déjà largement libérée. Il existe des tas de composants open source décrits en VHDL et/ou en Verilog à présent. Les outils de synthèse libres arrivent aujourd’hui à maturité avec Yosys, bien sûr, pour le Verilog (et bientôt mature pour le VHDL grâce au greffon GHDL-yosys), mais aussi Alliance pour le VHDL.
Les trois piliers logiciels (EDA pour les outils, PDK les données et RTL le design) permettant de réaliser un ASIC sont donnés dans une autre diapo de Tim ci‑dessous :
Une fois la description « RTL » du composant synthétisée, il nous reste beaucoup d’étapes à franchir avant d’obtenir une description des masques de gravure permettant la fabrication proprement dite. Toutes ces étapes nécessitent l’utilisation de logiciels spécifiques pour réaliser les masques, construire l’arbre d’horloge, simuler en analogique certaines parties, concevoir les alimentations… Beaucoup de logiciels libres existent pour cela, tous ne sont pas matures ou restent très universitaire dans leur version open source. Mais il est possible de les utiliser tout de même pour réaliser un composant, comme l’a démontré Tim Edwards avec le Raven (un microcontrôleur RISC‑V à base de PicoRV32).
Cependant, même s’il n’a utilisé que des logiciels libres pour réaliser le Raven, Tim n’a pas pu accéder à la description physique des composants numériques qu’il utilisait. Il a dû se contenter de « boîtes noires » représentant chaque fonction logique à assembler pour réaliser le microcontrôleur. En effet, tous ces logiciels libres demeurent quasiment inutiles si l’on n’a pas accès à la description physique de la technologie cible utilisée. Les fondeurs de silicium fournissent un PDK (process design kit) contenant des bibliothèques de composants avec la description physique de leurs technologies, ainsi que la géométrie de chaque transistor et les modèles de simulations spice permettant de valider le comportement analogique. Et pour avoir accès à ces PDK, la vente de vos deux reins ne suffira pas, même si vous signez les triples NDA (accord de non‑divulgation) avec votre sang. Ce PDK reste le gros frein à la libération du matériel, un caillou dans la chaussure du matériel libre. C’est ce que Google a bien compris en finançant le développement d’un PDK libre via la société SkyWater : le SKY130.
La publication du SKY130 vient d’être annoncée cette semaine par Tim Ansell lors d’un « dial‑up » de la FOSSi Foundation. Comme son nom l’indique, ce PDK cible la technologie 130 nm. Cette taille de gravure peut sembler obsolète quand on sait qu’Intel fabrique de plus en plus en 7 nm, et commence même à tester le 4 nm. Mais les chaînes de fabrication de silicium avec cette finesse de gravure permettent un coût de production très raisonnable pour des performances qui ne sont pas non plus ridicules. SiFive, par exemple, a sorti un microcontrôleur 32 bits RISC‑V (E310) gravé en 180 nm et tout de même cadencé à 320 MHz. Il est donc possible de réaliser beaucoup de chose avec du 130 nm.
Et pour promouvoir son PDK et fédérer une communauté de passionnés, hobbyistes, universitaires, « startupeuses », etc., Google a décidé de produire quarante projets à base de ce PDK tous les six mois et gratuitement. Le premier « shuttle » est prévu pour novembre. Pour être dans le wagon, il faut que son projet soit open source et le soumettre au site en ligne efabless.com. Visiblement, la méthode de choix des projets retenus n’est pas encore bien définie ; mais si vous êtes retenu, vous aurez une réponse par courriel.
Il est temps pour LinuxFr.org de faire passer TapTempo dans une autre sphère que le simple programme en Brainfuck et de proposer un composant électronique TapTempoASIC !
Et pourquoi ne pas proposer un FPGA en 130 nm ? Même si aujourd’hui les FPGA sont plus proches du 40 nm, un FPGA open source comme le kFPGA de killruana, ça aurait la classe.
Comme j’en parlais sur LinuxFR, la société QuickLogic propose un kit de développement avec son microcontrôleur EOS S3. Micro qui a la prétention de n’utiliser que des logiciels libre pour son développement.
Réception
Le site web indiquait des «précommande». Je ne m’attendais donc pas à recevoir l’objet en moins d’une semaine, et sans frais de douanes !
Le kit tient dans le creux de la main
Bref, si vous arrivez a trouver quelques amis pour faire une commande groupée (les frais de port pour la France sont plus cher que le kit lui même : $58 pour un kit à $49), n’hésitez pas ! Ça arrivera vite.
Branchement
Au branchement sur l’usb-mini du kit, la led RGB s’allume à fond puis s’éteint progressivement en moins d’une seconde. Et … rien sur les messages kernel.
Il va falloir regarder tout ça de plus près et aller lire la doc. Le code source des exemples est dispo sur un github.
Clignotage de LED
QuickLogic vient de faire une vidéo basique pour donner quelques trucs de mise en route.
Pour que le port série soit détecté dans le kernel il faut notamment appuyer sur le bouton reset. La led bleue va clignoter 5 secondes. Il faudra attendre à nouveau 5 seconde et le port /dev/ttyACM0 apparaîtra dans le dmesg :
[juin30 13:25] usb 3-3.1.2: new full-speed USB device number 17 using xhci_hcd
[ +0,100996] usb 3-3.1.2: New USB device found, idVendor=1d50, idProduct=6140
[ +0,000005] usb 3-3.1.2: New USB device strings: Mfr=0, Product=0, SerialNumber=0
[ +0,000575] cdc_acm 3-3.1.2:1.0: ttyACM0: USB ACM device
On peut ensuite simplement s’y connecter avec screen pour récupérer une invite de commande sur le micro :
$ screen /dev/ttyACM0 115200
####################
Quicklogic QuickFeather LED / User Button Test
SW Version: qorc-sdk/qf_apps/qf_helloworldsw
Jun 7 2020 12:04:51
##########################
Hello world!!
#*******************
Command Line Interface
App SW Version: qorc-sdk/qf_apps/qf_helloworldsw
#*******************
[0] >
De la on peut piloter les trois LED et lire le bouton, pour cela il suffit de se mettre en mode diagnostique:
[0] > red
ERROR: no such command: red
[0] > help
help-path: (top)
diag - QuickFeather diagnostic commands
exit - exit/leave menu
help - show help
? - show help
help-end:
[0] > diag
[1] diag > exit
[0] > help
help-path: (top)
diag - QuickFeather diagnostic commands
exit - exit/leave menu
help - show help
? - show help
help-end:
[0] > diag
[1] diag > help
help-path: diag
red - toggle red led
green - toggle green led
blue - toggle blue led
userbutton - show state of user button
exit - exit/leave menu
help - show help
? - show help
help-end:
[1] diag > red
[1] diag > blue
[1] diag > red
[1] diag > green
[1] diag > blue
[1] diag > userbutton
Not pressed
[1] diag > userbutton
Pressed
[1] diag >
Pour configurer les différentes connexions des blocs de logiques contenus dans un FPGA il faut lui fournir un fichier de configuration appelé «bitstream». Quand on parle de libération des FPGA, on pense principalement à la publication de ces spécifications . Jusqu’à présent, cette « libération » s’est faite, pour une poignée de FPGA (majoritairement Lattice), par ingénierie inverse. Donc jamais à l’initiative du constructeur, ce dernier n’ayant même pas toujours connaissance de projet d’ingénierie inverse à destination de ses produits. Et il faut aller fouiller dans d’obscurs fils Twitter et autre forums de bidouilleurs pour les découvrir.
Mais la libération s’accélère, et une petite société peu connue dans le monde du FPGA vient de lancer un produit basé sur des outils opensource pour le développement : l’EOS S3.
Comme on peut le voir dans le diagramme bloc ci-dessous, le produit est en fait un microcontrôleur Cortex-M4 qui possède une zone périphérique «de FPGA» appelé eFPGA.
La société Quicklogic a considéré que développer des logiciels de synthèse et de placement routage n’était pas son métier. Elle s’est donc « contenté » de l’adapter aux logiciels open source de la suite symbiflow.
Pour la première fois dans l’histoire des FPGA, nous avons donc une société qui affirme documenter son « bitstream » et qui propose des outils libres pour le développement. C’est un événement que beaucoup attendaient depuis des dizaines d’années !
Bon le (tout petit) FPGA ne concerne qu’une partie du composant. Mais c’est un bon début, et l’utilisation de logiciels libres reste la philosophie de la société pour le développement de ce produit. Comme dit dans les avantages de la fiche marketing du kit de développement :
« No more multi Gigabyte software installs, no more of the hassles associated with proprietary tools, no more vendor-specific hardware incompatible with the industry. »
eFPGA
La datasheet nous dit que la partie FPGA (celle qui nous intéresse ici) est composée de :
891 cellules logiques
8 blocs de RAM double ports de 8Kbits
2 multiplieurs câblés de 32×32 bits
32 I/O configurables
Alors certes, on est très très bas dans la gamme des FPGA du marché. Mais on peut déjà envisager faire des petites choses intéressantes avec. Surtout qu’il n’y a pas que le FPGA dans ce microcontrôleur.
Kit de développement QuickFeather
Le kit est encore en phase de lancement, même s’il semble que certaines développeuses aient déjà reçu la carte pour faire des tests. Le tarif de $50 n’est pas prohibitif pour en envisager l’acquisition à des fin de tests. Les frais de port de $80 par contre posent problème, surtout s’il faut ajouter des frais de douane.
Bref, ça n’est pas du vaporware puisque les composants existent, mais il est pour l’instant difficile d’en dire plus concernant les outils. Dans tous les cas une nouvelle très rafraîchissante, et une accélération de la libération des FPGA qui fait plaisir !
[Édition le 17 juin 2020]
L’entreprise qui est derrière ce nouveau produit est Antmicro. Une entreprise qui fait de la conception FPGA/ASIC à base de logiciel libre. Il semble également qu’ils aient été aidé par google.
Le lecteur assidu de LinuxFr.org sait déjà sans doute ce qu’est un FPGA. Rappelons‑en cependant brièvement la définition.
Les FPGA sont des composants constitués de « champs de portes
programmables ». L’idée est de graver un certain nombre d’éléments
logiques simples sous forme de matrice et de laisser au développeur le
loisir de reconfigurer à l’infini les connexions entre ces portes. Une
fois les connexions configurées, on se retrouve avec un composant
numérique sur mesure qui ne ressemble à aucun composant disponible chez
les fournisseurs classiques. C’est très pratique quand on a besoin
d’architectures bâtardes, ou quand justement on développe un composant
numérique : ça permet de reconfigurer à l’infini pour déverminer et
évaluer les performances.
Pepijn de Vos a effectué un stage pour Symbiotic EDA. Et l’ingénierie inverse du GW1N était son sujet de stage. Il a rendu son rapport avant Noël sur GitHub et a publié le code source du projet Apicula.
Parlons maintenant du grand drame des FPGA : ils sont complètement
verrouillés car, pour reconfigurer ces fameuses connexions, il faut leur
téléverser un fichier nommé bitstream qu’aucun constructeur de
FPGA ne documente. Ce drame conduit les libristes que nous sommes à se
taper des installations d’outils propriétaires particulièrement
volumineux (surtout dans le cas de Xilinx et Altera) et pas toujours
très stables. Tout ça pour générer le fameux bitstream.
Le format du bitstream n’est pourtant pas chiffré. Depuis plus d’une décennie, on sait
qu’il est parfaitement possible d’en faire l’ingénierie inverse. Mais
rien n’avait bougé jusqu’en 2015 quand Clifford (qui se prénomme
maintenant Claire) Wolf a sorti sa suite open source pour le Lattice iCE40 : IceStorm. Le projet IceStorm avait pour but d’analyser toute la gamme des FPGA iCE40 pour en documenter le format du bitstream.
Projet qui a parfaitement abouti et essaimé : toute la gamme des iCE40
est désormais accessible au moyen d’outils open source, ainsi que la
gamme des ECP5 avec le Projet Trellis.
Presque tous les modèles de FPGA ont leur projet d’ingénierie inverse aujourd’hui. Tous ne sont pas terminés, loin s’en faut. Néanmoins, quelques‑uns avancent, comme le projet Apicula de Pepijn de Vos ciblant les FPGA du constructeur chinois Gowin.
Dire que le projet Apicula est abouti serait un raccourci un peu
rapide, il manque encore en effet un certain nombre de blocs à décoder.
Cependant, il est possible aujourd’hui de réaliser un projet très simple
(UNE LED QUI CLIGNOTE \o/) grâce au travail effectué.
Oui, toi aussi, cher lecteur, tu te demandes bien l’intérêt de ce zoom. ;)
On voit différents éléments dans ce schéma, de la mémoire vive, des PLL pour générer les horloges, des multiplieurs câblés (DSP), des blocs d’entrées‑sorties (IOB) et surtout — ce que l’on voit le plus — des CFU (Configurable Function Unit).
Chez Gowin, le CFU est l’élément de base constitué ainsi :
Les deux éléments qui nous intéressent ici sont : la LUT (Look Up Table) et le REG (registre). Ces deux éléments sont la base de la logique synchrone.
Le registre recopie son entrée sur la sortie au front montant de l’horloge, la sortie restant stable le reste du temps.
La LUT, comme son nom anglais l’indique, est une table de vérité,
qui, dans le cas de ce petit FPGA, comporte quatre entrées binaires et
une sortie. La configuration du FPGA viendra remplir cette table de
vérité pour réaliser une fonction logique. Le registre se trouvant
derrière se charge ensuite de verrouiller le résultat au rythme
de l’horloge.
Si l’on arrive à déchiffrer le bitstream pour pouvoir
configurer ces LUT, ces registres ainsi que les blocs d’entrées‑sorties
(IOB), alors on a (presque) gagné : on peut réaliser un composant simple
mais fonctionnel.
Et c’est ce qu’a réalisé Pepijn de Vos, on peut donc dire qu’il a amorcé la libération du GW1N de Gowin !
Le projet n’est cependant pas terminé, il faut encore déchiffrer les
autres blocs pour permettre l’utilisation complète du FPGA. Il faut
également réussir à documenter les temps de propagation des signaux
entre les différents blocs. L’information de ces temps de propagation
permet au logiciel de placement routage (nextpnr, pour ne citer que le plus célèbre en libre) de faire son travail correctement.
Mais alors, cette LED clignotante, elle vient ?
Minute, papillon ! Dans un premier temps, il va falloir trouver une
carte électronique munie d’un FPGA de Gowin. Nous allons ensuite nous
servir des données déjà produites par le projet Apicula pour faire la
synthèse avec Yosys, puis le placement‐routage avec nextpnr.
Pour le moment, deux kits de développement ont été utilisés dans le projet Apicula :
le kit LittleBee TEC0117, des Allemands de Trenz Electronic (~ 30 €) ;
Nous allons tester avec le kit allemand TEC0117, mais le Tang Nano ne
change pas grand’chose à la procédure (et il est moins cher).
On doit installer :
Yosys, le logiciel de synthèse Verilog. Pour le détail des dépendances et autres subtilités d’installation, voir le site officiel. Sinon, pour résumer :
git clone https://github.com/YosysHQ/yosys.git
cd yosys make sudo make install
nextpnr, le logiciel de placement routage. Il faut le compiler avec le paramètre «generic». Les deux autres paramètres possible à ma connaissance sont ice40 et ecp5 (les deux gammes de FPGA vraiment prises en charge par nextpnr) : git clone https://github.com/YosysHQ/nextpnr.git cd nextpnr/ cmake -DARCH=generic . make sudo make installDans mon cas, j’ai dû forcer l’utilisation de Python 3.7 dans le fichier CMakeLists.txt : find_package(PythonInterp 3.7 REQUIRED); pour pouvoir exécuter les scripts en argument avec Python 3.7.
Apicula, dont il faut cloner le dépôt Git : git clone https://github.com/pepijndevos/apicula.git cd apicula
pour l’instant la « base de données » des éléments trouvés par ingénierie inverse n’est pas « commité » dans le projet Apicula, il faut donc avoir une installation de l’EDI officiel de Gowin ; les scripts du projet Apicula iront fouiller dans les données de l’IDE pour générer un fichier intelligible en JSON et pickle (Python), il n’est cependant pas nécessaire d’avoir la licence ;
il faut également aller chercher le « pinout » de nos FPGA sur le site officiel de Gowin et le mettre dans son répertoire local nommé ~/Documents/gowinsemi :
Maintenant que nous avons les outils installés, lançons l’exemple générique du projet Apicula :
d’abord, on génère la base de données des éléments du FPGA : export GOWINHOME=/chemin/de/linstallation/gowin/IDE/ export DEVICE="GW1NR-9" # TEC0117 python dat19_h4x.py # makes $DEVICE.json python tiled_fuzzer.py # makes $DEVICE.pickle
muni de cette base de données, on peut se lancer dans la synthèse du (pas si) simple porte‑gramme de clignotement de LED donné en Verilog ci‑dessous : module top; wire clk; (* BEL="R29C29_IOBA", keep *) GENERIC_IOB #(.INPUT_USED(1), .OUTPUT_USED(0)) clk_ibuf (.O(clk)); wire [7:0] leds; (* BEL="R1C8_IOBA", keep *) GENERIC_IOB #(.INPUT_USED(0), .OUTPUT_USED(1)) led7_obuf (.I(leds[7])); (* BEL="R1C8_IOBB", keep *) GENERIC_IOB #(.INPUT_USED(0), .OUTPUT_USED(1)) led6_obuf (.I(leds[6])); (* BEL="R1C10_IOBA", keep *) GENERIC_IOB #(.INPUT_USED(0), .OUTPUT_USED(1)) led5_obuf (.I(leds[5])); (* BEL="R1C10_IOBB", keep *) GENERIC_IOB #(.INPUT_USED(0), .OUTPUT_USED(1)) led4_obuf (.I(leds[4])); (* BEL="R1C11_IOBA", keep *) GENERIC_IOB #(.INPUT_USED(0), .OUTPUT_USED(1)) led3_obuf (.I(leds[3])); (* BEL="R1C11_IOBB", keep *) GENERIC_IOB #(.INPUT_USED(0), .OUTPUT_USED(1)) led2_obuf (.I(leds[2])); (* BEL="R1C12_IOBA", keep *) GENERIC_IOB #(.INPUT_USED(0), .OUTPUT_USED(1)) led1_obuf (.I(leds[1])); (* BEL="R1C12_IOBB", keep *) GENERIC_IOB #(.INPUT_USED(0), .OUTPUT_USED(1)) led0_obuf (.I(leds[0])); reg [25:0] ctr; always @(posedge clk) ctr <= ctr + 1'b1; assign leds = ctr[25:18]; endmoduleUn habitué des LED qui clignotent en Verilog reconnaîtra tout de suite le compteur dans les dernières lignes (always, reg…) mais sera peut‑être perturbé par la déclaration des entrées‑sorties. Il faut juste avoir en tête que le projet n’est pas terminé et qu’il faut se taper le placement‐routage des entrées‑sorties « à la main », d’où les directives (* ... *) et les modules GENERIC_IOB().
le script pour la synthèse et le placement routage est donné dans l’exemple : $ cd generic $ bash simple.sh blinky.v # TEC0117 $ cd .. $ python gowin_pack.py generic/pnrblinky.json $ python gowin_unpack.py pack.fs $ yosys -p "read_verilog -lib +/gowin/cells_sim.v; clean -purge; show" unpack.v
on doit se retrouver avec un bitstream nommé pack.fs que l’on peut téléverser dans le FPGA au moyen de l’utilitaire libre openFPGALoader maintenu par Trabucayre (Gwenhael Goavec‑Merou) : openFPGALoader -m -b littleBee pack.fs # FOSS programmer Parse pack.fs: Done erase SRAM Done Flash SRAM: [==================================================] 100.000000% Done SRAM Flash: FAIL Le FAIL est connu et vient d’une sombre histoire de somme de contrôle que openFPGALoader ne sait pas encore calculer et qu’Apicula ne fournit pas. Un ticket est ouvert sur le sujet dans le projet, Trabucayre sera ravi d’accepter des correctifs.
Et les huit LED doivent clignoter. Enfin, disons plutôt qu’elles
comptent en binaire. Pour voir la vidéo des LED clignotantes, c’est sur YouTube.
Architectures de développement hétéroclites
Comme nous avons des outils open source, il est possible de
développer sur des ordinateurs à base d’architectures différentes de
x86. Voici un petit exemple de téléchargement d’un bitstream sur Tang Nano au moyen d’un Raspberry Pi (architecture ARM). Le bitstream en question permet de piloter un écran à cristaux liquides.
Chose impossible à faire avec les Vivado, Diamond et autres Quartus.
C’est encore très expérimental
Comme nous venons de le voir, le projet Apicula est encore très
expérimental. Cependant, tous les ingrédients sont là et la preuve de
fonctionnement est faite. Donc, à condition de mettre un minimum les
mains dans le cambouis, on peut désormais générer des bitstreams pour les GW1Nx avec des outils open source.
Super ! Comment je fais pour contribuer ?
Autant d’enthousiasme fait plaisir à voir. Pour contribuer, le mieux
est d’acquérir l’une des deux cartes citées dans cette dépêche et
d’installer le logiciel officiel de Gowin.
Ensuite, différentes commandes permettant de mettre le pied à l’étrier de l’ingénierie inverse sont données sur le README.md du projet Apicula.
Sinon, n’hésitez pas à laisser une issue sur le projet GitHub ou d’interpeller Pepijn directement sur le « silo social Twitter ». Pepijn est super content de voir des gens s’intéresser au projet et répond très vite.
Chisel is a hardware description language embedded in Scala language. Compared to VHDL/Verilog Chisel it’s a high-level language. With Chisel it’s easier to parametrize and to abstract your hardware. It’s the language used for all SiFive RISC-V cores and for Google Edge TPU.
What’s great with chisel that it generate Verilog sources for synthesis. And we can use this Verilog generated design for simulation or formal prove.
Simulation can be done in Scala with chisel.testers. But this tester is mostly under development project for the moment. And there is no test library for common busses and devices like SPI, Wishbone, AXI, PWM, …
CocoTB is a cosimulation testbench framework written in Python. Main advantage of CocoTB is that you write your testbench stimulis in python language. Python is really comfortable programming language. The other advantage of using CocoTB is that there is a growing library of modules available to test devices like SPI, Wishbone, USB, uart, … And its easier to use a library than to reinvent the wheel.
Then, let’s write Chisel testbench with CocoTB !
As an example we will use the ChisNesPad project (yes, same as formal prove article).
The directory structure is following :
/
|-- build.sbt <- scala build configuration
|-- src/ <- all chisel sources
| |-- main/
| |-- scala/
| |-- chisnespad.scala <- Chisel module we will test
| |-- snespadled.scala <- "top" module to test with
| tang nano (gowin)
|-- formal/ <- formal directory
|-- platform/ <- some usefull files for synthesis with
| final platform (gowin).
|-- cocotb/ <- python cocotb tests
|-- chisnespad/ <- test for chisnespad core
| |-- Makefile <- makefile to compile and launch simulation
| |-- test_chisnespad.py <- cocotb stimulis
|-- snespadled/ <- test for «top» project that toggle leds
| when push buttons
|-- Makefile
|-- test_snespadled.py
$ cd chisNesPad/cocotb/chisnespad/
$ make
make[1]: Entering directory '/home/fabien/myapp/chisNesPad/cocotb/chisnespad'
[...] lots of compilation lines [...]
/myapp/chisNesPad/cocotb/chisnespad/build/libs/x86_64:/usr/local/lib:/usr/local/lib:/usr/local/lib:/usr/local/lib:/usr/local/lib MODULE=test_chisnespad \
TESTCASE= TOPLEVEL=ChisNesPad TOPLEVEL_LANG=verilog COCOTB_SIM=1 \
/usr/local/bin/vvp -M /home/fabien/myapp/chisNesPad/cocotb/chisnespad/build/libs/x86_64 -m gpivpi sim_build/sim.vvp
-.--ns INFO cocotb.gpi gpi_embed.c:103 in embed_init_python Using virtualenv at /home/fabien/pyenv/pyenv37/bin/python.
-.--ns INFO cocotb.gpi GpiCommon.cpp:91 in gpi_print_registered_impl VPI registered
0.00ns INFO Running tests with Cocotb v1.2.0 from /home/fabien/pyenv/pyenv37/lib/python3.7/site-packages
0.00ns INFO Seeding Python random module with 1583180134
0.00ns INFO Found test test_chisnespad.always_ready
0.00ns INFO Found test test_chisnespad.double_test
0.00ns INFO Found test test_chisnespad.simple_test
0.00ns INFO Running test 1/3: always_ready
0.00ns INFO Starting test: "always_ready"
Description: None
VCD info: dumpfile ChisNesPad.vcd opened for output.
401300.00ns INFO Test Passed: always_ready
401300.00ns INFO Running test 2/3: double_test
401300.00ns INFO Starting test: "double_test"
Description: None
436000.00ns INFO Value read CAFE
470420.00ns INFO Value read DECA
471440.00ns INFO Test Passed: double_test
471440.00ns INFO Running test 3/3: simple_test
471440.00ns INFO Starting test: "simple_test"
Description: None
506140.00ns INFO Value read CAFE
507160.00ns INFO Test Passed: simple_test
507160.00ns INFO Passed 3 tests (0 skipped)
507160.00ns INFO *************************************************************************
** TEST PASS/FAIL SIM TIME(NS) REAL TIME(S) RATIO(NS/S) **
*************************************************************************
** test_chisnespad.always_ready PASS 401300.00 2.78 144519.92 **
** test_chisnespad.double_test PASS 70140.00 0.49 143736.56 **
** test_chisnespad.simple_test PASS 35720.00 0.25 144120.85 **
**************************************************************************************
507160.00ns INFO *************************************************************************************
** ERRORS : 0 **
*************************************************************************************
** SIM TIME : 507160.00 NS **
** REAL TIME : 3.52 S **
** SIM / REAL TIME : 144276.59 NS/S **
*************************************************************************************
507160.00ns INFO Shutting down...
make[1]: Leaving directory '/home/fabien/myapp/chisNesPad/cocotb/chisnespad'
(Note : I can’t find how to change width of code text in this #*/% wordpress )
Waveform of CocoTB stimulis for NES Pad controller
Let’s see what happen
All commands are described in the Makefile in directory chisNesPad/cocotb/chisnespad/.
Chisel Module
The Chisel Module we test here is in directory src/main/scala/chisnespad/ and is named chisnespad.scala with following interfaces :
class ChisNesPad (val mainClockFreq: Int = 100,
val clockFreq: Int = 1,
val regLen: Int = 16) extends Module {
val io = IO(new Bundle{
/* SNES Pinout */
val dclock = Output(Bool())
val dlatch = Output(Bool())
val sdata = Input(Bool())
/* read/valid output */
val data = Decoupled(Output(UInt(16.W)))
})
//...
}
The scala verilog generator driver is given at the end of file :
object ChisNesPad extends App {
println("Generating Verilog sources for ChisNesPad Module")
chisel3.Driver.execute(Array[String](), () => new ChisNesPad)
}
This object will be called by SBT following command:
$ sbt "runMain chisnespad.ChisNesPad"
Generated Verilog
This will generate the Verilog file named ChisNesPad.v in root directory. With following interfaces :
As we can see, all bundled ports are kept but with little modification : dot ‘.’ are replaced by underscore ‘_’. clock and reset has been added and we can retrieve our decoupled signal io.data.{ready, valid, bits} -> io_data_{ready, valid, bits} .
CocoTB testbench
With these changes in mind, we can read/write our chisel ports signals with CocoTB.
CocoTB tests are described in file test_chisnespad.py. This file describe a class to store all method and data for testing ChisNesPad Module then list cocotb test function :
# main class for all test
class ChisNesPadTest(object):
"""
"""
LOGLEVEL = logging.INFO
PERIOD = (20, "ns")
SUPER_NES_LEN = 16
NES_LEN = 8
def __init__(self, dut, reg_init_value=0xcafe, reg_len=16):
if sys.version_info[0] < 3:
raise Exception("Must be using Python 3")
self._dut = dut
#...
# all tests
@cocotb.test()
def simple_test(dut):
cnpt = ChisNesPadTest(dut)
yield cnpt.reset()
yield Timer(1, units="us")
dut.io_data_ready <= 1
#...
@cocotb.test()#skip=True)
def double_test(dut):
cnpt = ChisNesPadTest(dut)
yield cnpt.reset()
#...
@cocotb.test()
def always_ready(dut):
cnpt = ChisNesPadTest(dut)
yield cnpt.reset()
#...
Here we see tree tests decorated with @cocotb.test(). The our module ChisNesPad is the Device Under Test (DUT) and is passed in test function arguments : dut.
To access input/output ports we just have to use dot on our dut object.
set io.data.ready to logic level ‘1’ :
dut.io_data_ready <= 1
read io.data.bits
vread = int(dut.io_data_bits)
We can also read register under the module or a submodule :
countvalue = int(dut.countReg)
It’s also possible to write register under the module, but be careful of the race condition when you doing that. It can be re-written by simulation with 0-delay.
Get Waveform
All tests can be done with procedure describe above. But with Icarus as simulator we don’t get the waveforms.
It’s not easy to develop HDL without any waveform. To get waveform we can use another simulator that will generate the traces (mainly in VCD format) but Icarus is mature and free then it’s cheaper to use it.
The solution given in CocoTB documentation is to add following verilog code in top module :
`ifdef COCOTB_SIM
initial begin
$dumpfile ("ChisNesPad.vcd");
$dumpvars (0, ChisNesPad);
#1;
end
`endif
With this $dumpX() function we will records all signals under the file named ChisNesPad.vcd. If we had to add this code by hand each time we re-generate verilog from Chisel module, it would quickly become painful.
$ cocotbify
Usages:
cocotbify.py [options]
-h, --help print this help
-v, --verilog verilog filename to modify (filename is used
as module name)
-o, --output filename output filename
This tool will take a verilog source as input and generate an output with dumpvars code added for cocotb. In the example makefile the output name will be ChisNesPadCocotb.v. This file will be used by CocoTB and Icarus for simulation. VCD file can then be view with gtkwave:
$ gtkwave ChisNesPad.vcd
Simulation traces
Conclusion
As we can see, it’s perfectly possible to use CocoTB framework for testing Chisel components. CocoTB has more library test modules available than chisel.tester and we can code in Python. Python is used by lots of peoples through the world and is less scary than Scala or SystemVerilog for hardware engineers that develop digital hardware.